
三种摄影测量解决方案
研究目标
我一直在使用PhotoScan Standard、Reality Capture(订阅版)和Zephyr Lite在过去的几个月里,我想深入研究它们的特性,确定哪种解决方案适合特定主题,我可以期待什么类型的输出质量以及我的硬件需要多少时间来制作游戏引擎/CG友好资产。审查摄影测量解决方案并非易事,每个软件都有特定的工作流程,项目并不总是一一对应。结果分析也可能是主观的,即使使用相同的软件,使用一组特定设置可以更好地处理对象,而另一个则需要不同的设置。使用高质量设置测试各种组合也需要花费大量时间,从而减少了可以研究的科目数量。然而,我 试图推断出一些特性和行为,希望可以阐明每种解决方案在给定情况下的能力。尽管解决方案在某些领域的表现可能有所不同,但此处审查的每个软件都能够产生出色的结果,并且它们的功能通常是互补的。
测试方法
已使用以下获得许可的摄影测量软件解决方案:
- RealityCapture 1.0.3.4987 / 1.0.3.5681(订阅版本)(1.0.3.4987 用于所有测试,除非指定 1.0.3.5681)
- Zephyr Lite 4.008 和 4.009
- 照片扫描标准 1.4.3 和 1.4.4
除了基于此价格标签订阅的 RealityCapture 外,它们的价格低于 200 美元,具有永久许可。在本文中,出于可读性原因,RealityCapture 可能缩写为 RC 和 PhotoScan PS。
范围和工作流程
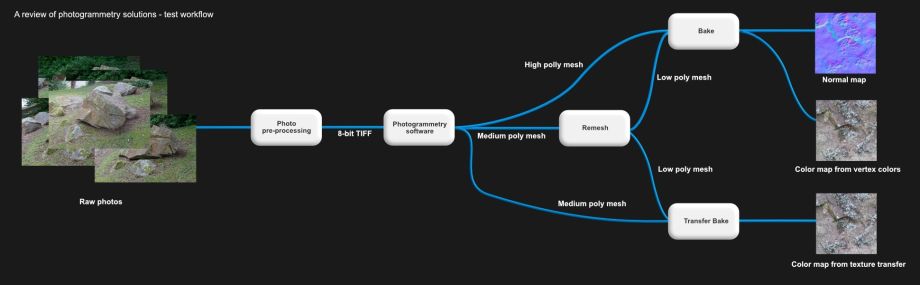
已经按照我目前用于创建资产的工作流程进行了测试,摄影测量软件正在为其生成以下内容:
- 用于烘焙几何细节(法线贴图等)的高多边形网格,对于颜色贴图烘焙由顶点颜色制作的情况,可选择使用顶点颜色。
- 一个 2MP(百万多边形)中等分辨率网格,用作在外部软件中创建低多边形网格的基础。
- 可选的颜色贴图纹理,用于最终颜色贴图是从摄影测量软件颜色贴图到低多边形网格几何的转换。
就摄影测量解决方案支持的功能分析而言,此评论并非详尽无遗,它仅旨在涵盖执行我正在使用的工作流程所需的元素。
地图生成
最终烘焙贴图的分辨率为 8192×8192 (8K)。目的是试图将摄影测量解决方案推向高层次的细节,因此选择了这种分辨率。
摄影测量解决方案的产品使用外部软件处理:
- ZBrush用于将 2MP 网格重新划分为低多边形网格(通常小于 20KP),Blender在需要时清理低多边形网格。对于曲面,plane3D 用作低多边形网格。
- RizomUV用于为低多边形网格创建 UV。
- Knald用于从顶点颜色和法线贴图(16xAA)烘焙颜色贴图。法线贴图在 Y 中反转。
- Substance Designer用于使用来自 Mesh baker(使用 8xAA)的Transferred 纹理将从摄影测量软件发出的颜色贴图(纹理)传输到低多边形网格几何体。
单个低多边形网格通常由 Zephyr 中网格生成。然后手动缩放和定位以烘焙其他摄影测量解决方案的网格。这是为了确保所有烘焙都是沿着相同的低多边形几何体和 UV 进行的。但在理想情况下,给定摄影测量软件的高多边形网格将用于派生低多边形网格,因此不需要手动对齐。由于后者并不总是完美的,因此在鉴赏标准中并未考虑由于对齐问题而导致的纹理中的潜在漏洞。
测试标准
法线贴图用于测试详细的几何生成。彩色地图主要因其清晰度而受到赞赏。不考虑颜色分布,因为测试系列的颜色图烘焙之间在该区域没有显着差异(部分原因可能是对照片进行了预处理以使它们的照明和着色均匀)。每个解决方案都提供了处理颜色恢复的工具,这些都值得检查。本次审查既不使用参考来比较结果,也不使用数字数据来确定质量因素。您不会在此处找到诸如“准确性”之类的术语,因为它们需要参考。对地图显示的视觉特征进行评论,并且有时可能是主观的评价。然而,我提供 1:
关于法线和彩色地图的讨论是在完整地图的提取物上进行的,在每个解决方案看起来具有代表性的区域中选择。一个或多个 512×512 区域取自原始地图,并在专用插图中以 1:1 的比例显示。值得考虑几个表现出不同特征的区域,但是,由于时间限制,还没有这样做。其他评价标准是处理速度、用户界面 (UI) 和参数化/调整设置的能力。
使用的硬件和照片处理
照片已使用佳能 EOS 6D 以 RAW 格式(分辨率 5472×3748)拍摄,并在DxO Photolab 中进行白平衡校正、降噪、照明均匀性等处理,然后作为 8 位 TIFF 图像输入摄影测量软件。未对原始照片应用镜头失真校正。
软件解决方案在配备 64GB RAM、Core i7-6700 4 核 3.4Ghz CPU、GTX 1070 8GB GPU 的 Windows 10 PC 上运行。每个摄影测量软件都启用了 GPU 处理。
测试对象

已经测试了两个 3D 对象和一个表面。照片集并非都是“完美的”,因此可以测试解决方案的坚固性。
本次审查基于以下对象:
- “Boulder_8”:大巨石,107 张照片系列,以 50mm f/8 ISO 800 手持拍摄。重叠中高,大多数照片包含景深 (DoF) 模糊但区域清晰。一些照片有运动模糊。
- “Rock_2”:岩石表面,在三脚架上以 35mm f/10 ISO 100 拍摄的 71 张照片,大量重叠,一些自由度模糊,没有运动模糊。
- “GiantPlant_5”:手持拍摄的大型植物(约 1.5m 宽)的叶子,105mm f/8 ISO 400 下的 117 张照片。中等重叠,多张照片的景深模糊,叶子下面有一些运动模糊(不考虑贴图生成,只保留顶面),一些镜面反射。这个物体结合了薄而相对光滑的表面和一些可见的反射。
这组对象远非详尽无遗,尽管它们涵盖了许多特征,例如 3D 和平面、坚硬和光滑的纹理、厚和薄的对象、部分反射和非反射表面、良好和中等的照片质量集,对更多对象进行测试肯定会很有用。
摄影测量软件配置
每个摄影测量软件都有自己的一组设置,但是,有些操作是通用的。对于每个照片集,在照片对齐之后,边界框用于将计算集中到对象所在的点云的所需部分。每个解决方案都具有纹理功能,用于与从顶点颜色烘焙的颜色图进行比较。摄影测量软件内部的纹理需要对使用默认展开方法的网格展开。展开的网格通常是较低多边形数的网格,因此使用了 2MP 网格。出于测试目的,还在密度约 10 倍的更高多边形数网格上执行展开和纹理生成。这纯粹是为了检查纹理是仅基于网格信息执行的(在这种情况下,生成的纹理的清晰度会有所不同)还是与其他数据(例如实际照片)相关(然后纹理将大部分相同)。纹理也是在 16K 中制作的,因为所有解决方案都支持此分辨率。这有两个方面的帮助:一种可能希望在执行转移烘焙之前处理此 16K 纹理(例如对其进行锐化),后者如果具有比 8K 目标更高的分辨率,则更改细节可能会更少。
Zephyr 有一个选项可以在生成时锐化纹理,但为了与其他解决方案进行公平比较,此选项已关闭。Zephyr 在纹理化过程中还有一个功能,包括避免模糊区域,并且启用了此选项。
由于 RC 不允许用户确定重建网格的目标多边形数量,因此所有解决方案所使用的高多边形数量的确定是根据 RC 在高细节模式下生成的具有默认细节抽取因子的高多边形网格( ddf) 为 0.75。然后设置其他软件解决方案以匹配生成的多边形计数。
结果展示
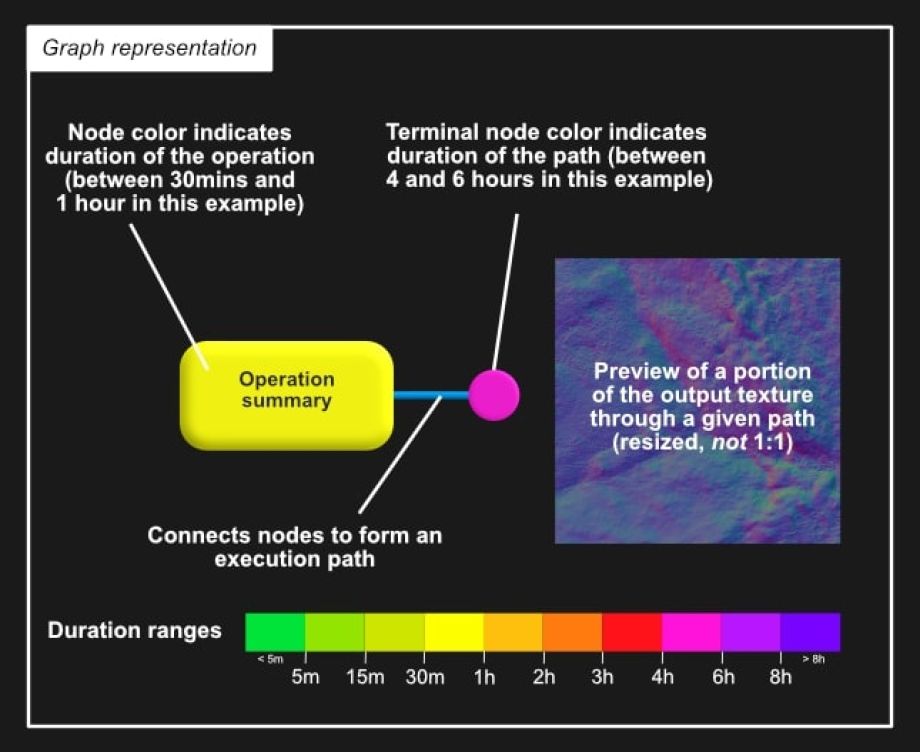
结果以图表和烘焙地图提取物的形式呈现。图形节点代表摄影测量软件中的操作,它们从左到右读取并形成直到圆形终止节点的多条路径。路径将被视为替代方案,它们是使用给定摄影测量软件针对给定照片集进行测试的不同场景。每个节点都有一种颜色代表以小时/分钟为单位的持续时间范围,其比例显示在图表的左下角。每条路径末端节点的颜色代表整个路径的持续时间范围。
烘焙法线和/或颜色贴图的提取预览显示在每条路径的末尾。当颜色贴图与法线贴图相关联时,这是顶点颜色的烘焙。单独的颜色贴图是来自纹理传输的烘焙(由摄影测量软件烘焙的纹理,然后传输到低多边形网格几何体)。预览不是 1:1 的比例,它们被调整为 200×200(提取为 512×512)并提供方便。单独的插图提供了 1:1 的摘录,以查看纹理。
以白色勾勒出的路径是“最佳”路径。最佳路径代表感知质量和处理速度之间的权衡。这种选择是高度上下文/主观的,可能会根据需要和使用的硬件而有所不同。
“Boulder_8”系列 – RealityCapture
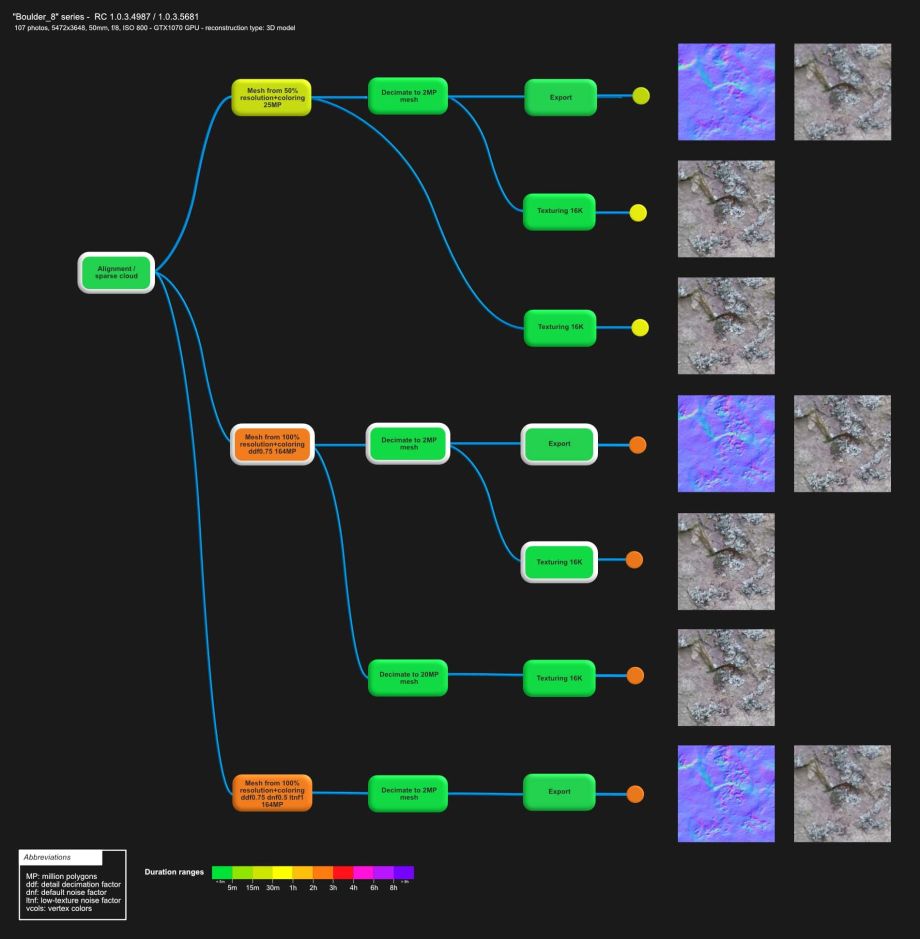
RealityCapture (RC) 工作流程包括照片对齐和网格重建。与其他解决方案不同,没有可见的密集云生成步骤。使用了普通细节(50% 分辨率的照片)和高细节(100% 分辨率)路径。在后一种情况下,默认噪声因子 (dnf) 和低纹理噪声因子 (ltnf)(来自高级设置的参数)被除以 2,以潜在地增加几何细节/噪声。颜色贴图由每种情况的顶点颜色以及两种纹理传输生成,一种来自 2MP 网格,一种来自较密集的网格(对于普通细节,使用高多边形 25MP 网格;对于高细节,生成 20MP 网格)通过抽取 164MP 网格)。
在处理速度方面,图表显示 RC 相对较快,没有路径超出 2-3 小时范围。
法线贴图 – RC
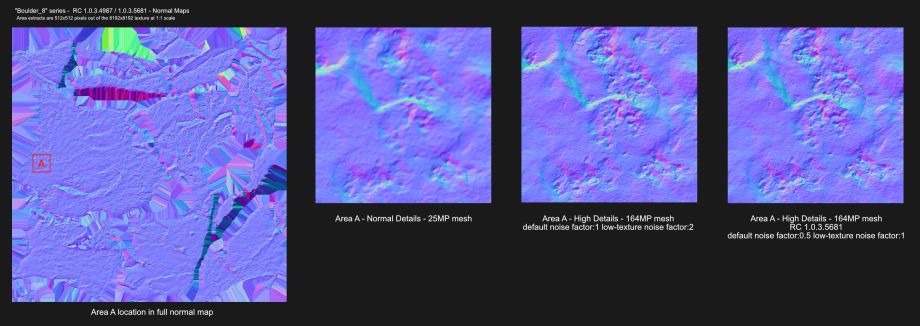
与正常细节相比,法线贴图在高细节中显示出更好的定义也就不足为奇了。查看 High Details 地图,我们可以看到大比例地浮雕清晰,高度差异明显,平坦区域的细节量很少。带有修改过的 dnf/ltnf 的法线贴图看起来与带有未修改值的法线贴图几乎相同。
彩色地图 – RC

顶点颜色烘焙在高细节模式下比正常细节模式显示出更好的清晰度,这是预期的,因为高细节中的顶点密度更高。
在高细节模式下,与法线贴图不同,修改 dnf/ltnf 值的烘焙看起来与未修改值的烘焙明显不同(实际上更模糊)。否则,来自顶点颜色的烘焙和纹理转移几乎相同,来自顶点颜色的烘焙可能更详细一些。无论选择的模式或纹理网格的分辨率如何,纹理传输的烘焙都不会表现出重大差异。因此,只要我们使用纹理传输路径,High Details 和Normal Details 模式在颜色映射方面是相对等效的。两者之间的选择主要取决于我们想要获得的几何分辨率,如上图所示的法线贴图。
最优路径——RC
此处选择的最佳路径(以白色圈出的节点)是 High Details 路径,因为即使彩色贴图与 Normal Details 路径等效,但在 High Details 中更好地定义了法线贴图,并且处理时间保持合理。
“Boulder_8”系列 – Zephyr Lite
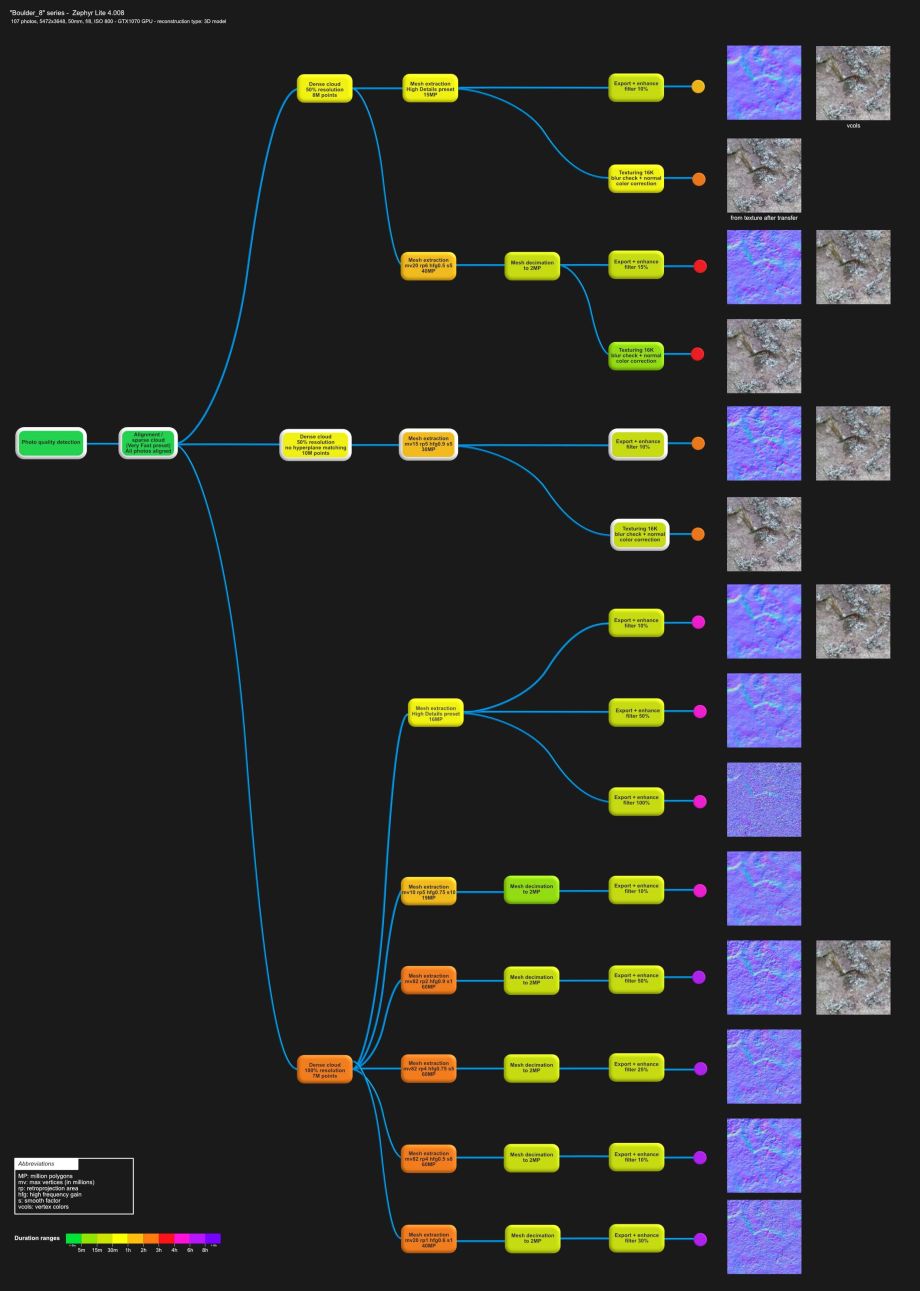
Zephyr 有很多可配置的参数,所以图表有点大,因为我想测试几个选项。它从照片质量检测开始,这在搜索具有运动模糊的照片时非常有用。质量测试并没有区分运动模糊和自由度模糊,所以在丢弃低分照片之前要小心。为了测试的目的,我留下了所有的照片。
在初始对齐/稀疏云生成后,Zephyr 生成密集云。处理照片的分辨率可通过百分比进行配置。为了使事情与其他软件相同,我选择了 50%(半尺寸)和 100%(全尺寸)路径(但可以选择任何百分比)。
对于这张照片集,无论我选择的照片分辨率如何,浓云中的点数都非常相似,这很出乎意料。值得注意的是,稠密的云可以被稠化(也可以网格化),虽然 Zephyr 将这种处理与主要的稠密云生成分开,但假设其他解决方案可能会将它们结合起来导致更稠密的点云(这尚未得到验证,可能是错的)。点云大小不一定是最终质量的决定因素(对于高多边形网格大小也是如此),重要的是应用所有过滤器后的效果,结果证明 Zephyr 可以输出清晰的法线贴图点比其他解决方案少得多的密集云。
关于 50% 分辨率路径,一个是在高细节模式(Zephyr 预设)下,它将输出顶点限制为 10M。第二条路径是使用自定义模式,最多可支持 20M 顶点和较小的重投影区域(用于获得更清晰的几何图形)。第三条路径是通过禁用超平面匹配来实现的,这应该只对薄几何有用,这里不是这种情况。在所有情况下,颜色贴图烘焙都是由顶点颜色和纹理转移制成的。对于 100% 分辨率路径,我使用带有高细节预设的网格重建,然后使用其他自定义模式来查看它们对法线贴图的影响。
Zephyr 有两种导出网格的方式,我们可以正常导出各种格式的网格,也可以导出并增强网格。后一个选项用于导出本次审查的高多边形网格。Zephyr 不会在内部生成非常高的多边形数网格(这有助于保持项目的轻量化),但可以在导出时对网格进行致密化,这样可以导出与其他测试解决方案的密度相匹配的 164MP 网格。增强过程与过滤器相关联,该过滤器用于分析原始照片的高频和梯度以创建位移。这会创建非常精细的细节,可以在法线贴图中看到。图的“导出+增强”节点中提到了此类过滤的数量。
在上面介绍的大多数路径中,2MP 网格大部分时间是从高多边形网格的抽取中生成的。然而,当使用纹理时,Zephyr 实际上会生成一个纹理网格,我们可以为其指定多边形数量。然后可以跳过单独的抽取,只为纹理网格指定一个较低的多边形数。然后可以使用后者代替 2MP 网格进行后续操作。使用这种方法,图中暴露的相关路径持续时间可以减少15到30m。对于禁用超平面匹配的路径,已跳过单独的 2M 网格。
现在让我们分析路径。通过 50% 分辨率路径,处理速度是所选选项的相对不同的函数,分别表示 1-2h、2-3h 和 3-4h。禁用超平面匹配为密集云生成提供了有趣的速度提升。对于 100% 分辨率路径,处理速度较慢主要是由于生成了密集的云。对于此照片集,100% 分辨率路径不会产生大小与 50% 路径明显不同的密集云,因此这可能不是保留的选项,除非它提供不同的输出,让我们在下面的地图分析中看到.
法线贴图 – Zephyr
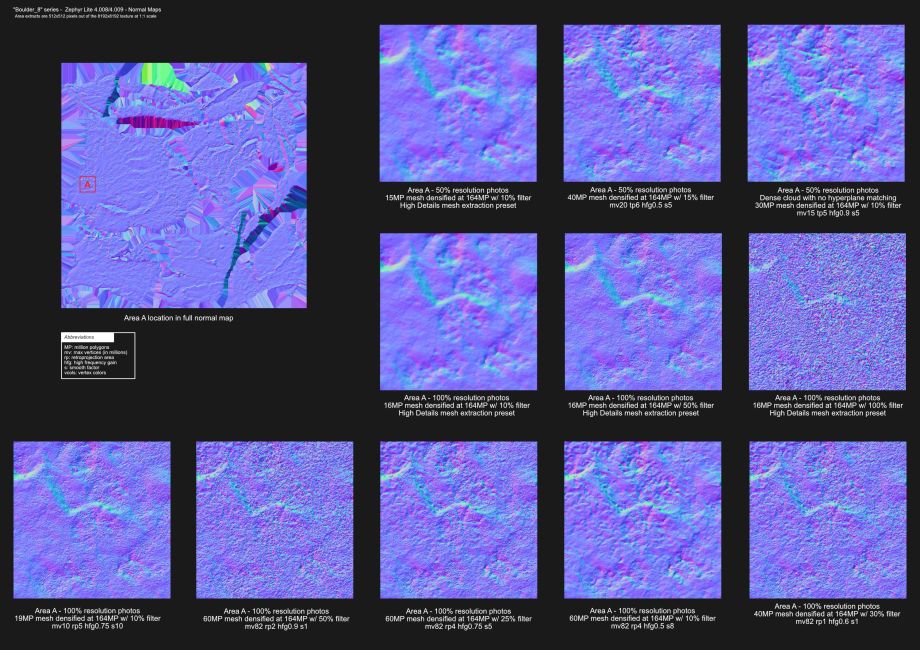
第 1 行:在 50% 分辨率大小的路径中,从网格导出生成的法线贴图在 164MP 下使用 10% 增强过滤器增强相当平滑和均匀,网格的致密化并没有锐化初始几何体。尽管如此,在 50% 分辨率路径上,使用自定义设置的网格提取生成了 40MP 网格,该网格通过 15% 过滤器导出和增强,在表面上显示更清晰的大尺度浮雕、“新”中尺度浮雕和详细的小尺度几何(由于增强过滤器)。无超平面匹配情况(基于 30MP 网格)的法线贴图看起来接近 40MP 网格解决方案(注意两个网格的顶点密度与超平面匹配无关,我只是在那里选择了两个不同的设置)。似乎禁用超平面匹配对本系列的网格几何没有影响,
第 2 行:这些在导出和增强阶段使用高细节网格提取预设和 10%、50% 和 100% 过滤器测试 100% 分辨率路径。我们可以在这里看到增强过滤器的效果,它不作用于大尺度几何体,而是根据过滤器强度或多或少地以或多或少的方式添加精细细节。
第 3 行:这些通过 100% 分辨率路径测试各种网格提取设置。我们可以看到较高的最大顶点数(60MP 网格的情况)会导致清晰的大尺度细节和中等尺度的细节。后者是否能更好地反映实际几何形状尚不清楚,因为我们没有使用参考。
从这些实验来看,Zephyr 似乎提供了一系列设置来精细配置几何输出。即使是从分辨率为 50% 的照片构建的密集云,它也能够通过网格提取使用高顶点密度和小尺度细节通过网格过滤产生清晰的大尺度细节。顶点密度的增加不仅锐化了大尺度细节,还增加了中等尺度细节,这可能或多或少取决于预期。为密集云生成禁用超平面匹配提供了速度提升,而对最终几何没有明显影响。尽管可配置性很高,但我无法在高细节模式下获得类似于 RC 的法线贴图类型;两者都可以很尖锐,但方式不同。
彩色地图 – Zephyr
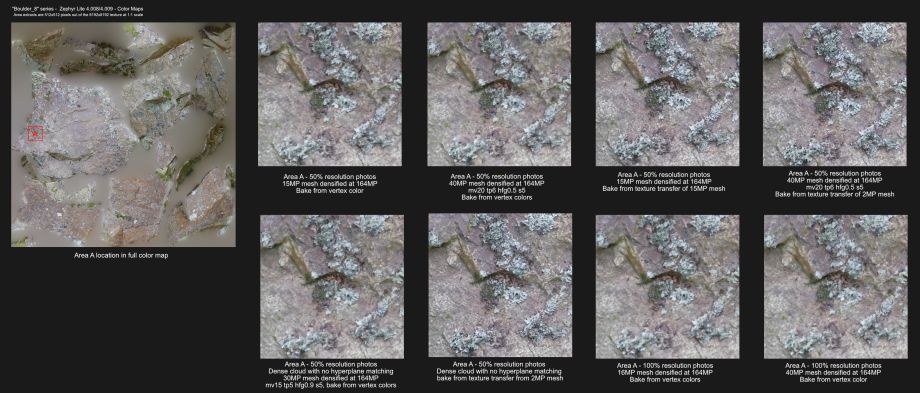
当从顶点颜色烘焙时,从 50% 或 100% 分辨率路径烘焙的颜色贴图看起来非常相似,这并不奇怪,因为两个密集的云都有大约相同数量的点。然而,与来自顶点颜色的烘焙相比,来自纹理转移的烘焙看起来更清晰、更详细。
最优路径——Zephyr
总的来说,100% 分辨率路径没有比 50% 路径带来任何好处。我们可以从更快的 50% 分辨率路径中获得详细的法线贴图和清晰的颜色贴图,尤其是在禁用超平面匹配的情况下:这是与纹理传输一起选择为最佳的路径。
“Boulder_8”系列 – PhotoScan
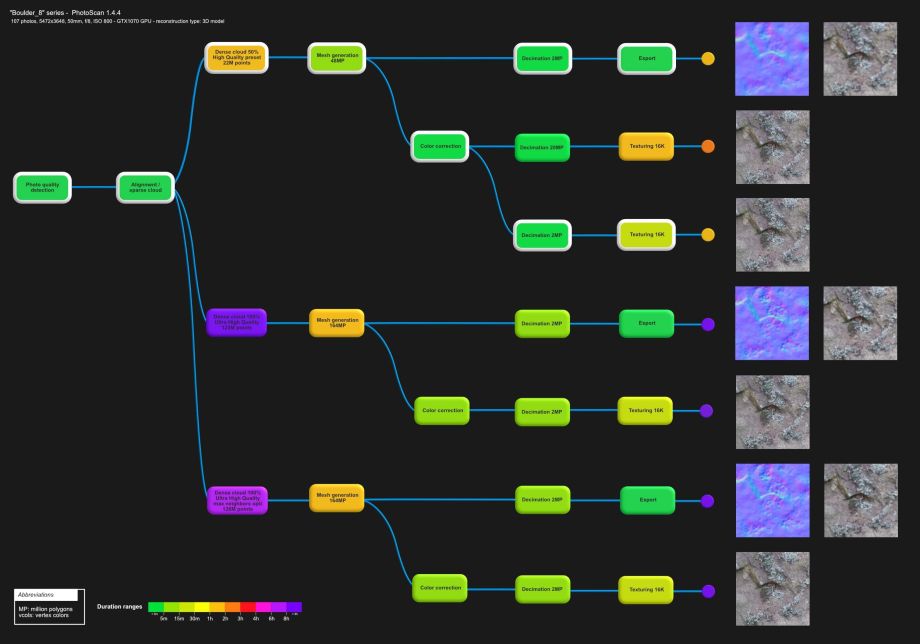
像 Zephyr 一样,PhotoScan (PS) 有一个照片质量索引工具,可以确定可能需要从集合中删除的照片。对于这些测试,使用了所有照片。
高品质(HQ – 半尺寸分辨率照片)和超高品质设置(UHQ – 全尺寸分辨率照片)生成了密集的云。由于 UHQ 路径有相当长的处理时间,我还对 UHQ 路径使用了值 50 的“最大邻居”(调整设置不是界面的一部分)优化,因此我们有 3 个主要路径,HQ、UHQ 和 UHQ选择。
HQ 路径为顶点颜色烘焙和纹理传输生成网格,后者使用两个网格来检查地图清晰度是否与其他解决方案一样。UHQ/opti 路径在单个 2MP 网格上测试纹理。即使在目标多边形计数时选择了 164MP,HQ 路径也会生成 48MP 网格,因此此处存在最大多边形计数,这可能是密集点云大小的函数。
关于处理速度,HQ 路径适合 1-2 或 2-3 小时的时间范围。但是,UHQ 路径具有更长的密集云生成时间。这个时间在 UHQ 优化路径中减少了,但仍然很高。可能有一些方法可以进一步减少最大相邻参数的其他值,以减少处理时间,但我只检查了 50 值。
法线贴图 – PS
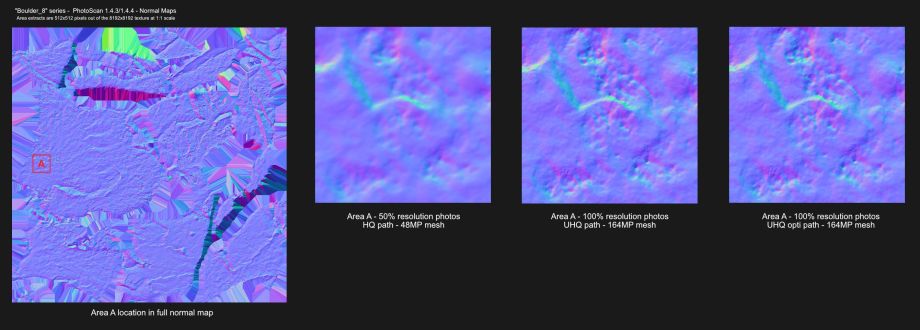
HQ 中的法线贴图非常平滑。UHQ 和 UHQ opti 版本更清晰、更详细,它们在视觉上看起来相同,这意味着优化没有降低输出。
彩色地图 – PS
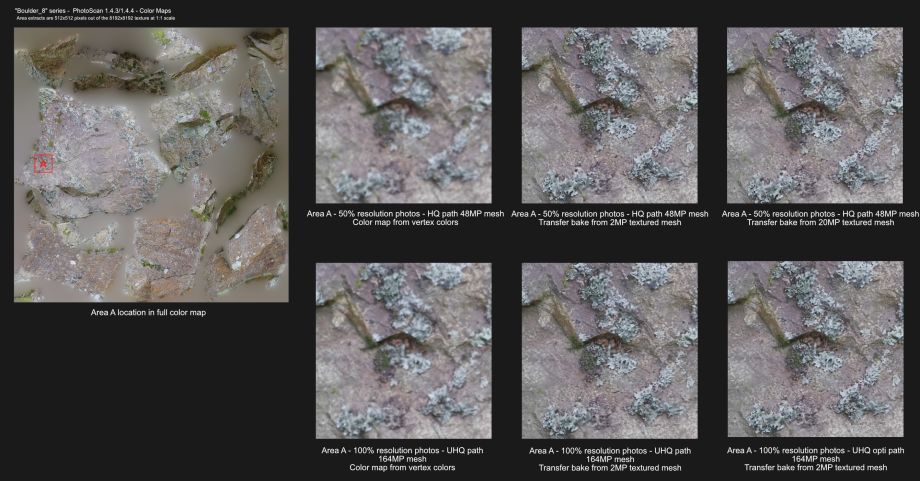
在 HQ 路径中,与顶点颜色相比,纹理传输烘焙会产生清晰而详细的输出。20MP 和 2MP 网格的转移烘焙之间似乎没有明显区别。在 UHQ/opti 路径上,转移烘焙也会产生比顶点颜色更清晰的结果,并且 UHQ 和 opti 路径似乎提供了相同的结果。如果每条路径的纹理传输烘焙看起来相似,路径的选择将主要由所需的几何恢复驱动(如法线贴图所示)。
最佳路径 – PS
由于 UHQ 路径即使在 opti 模式下也非常耗时,因此这里选择的最佳路径是 HQ 路径,带有用于颜色图的传输烘焙。通过进一步调整优化参数,可能会在 UHQ 优化模式下获得更短的持续时间,这有待检查。
“Boulder_8”系列——讨论地图
让我们并排放置每个解决方案的主要地图并进行讨论。
法线贴图
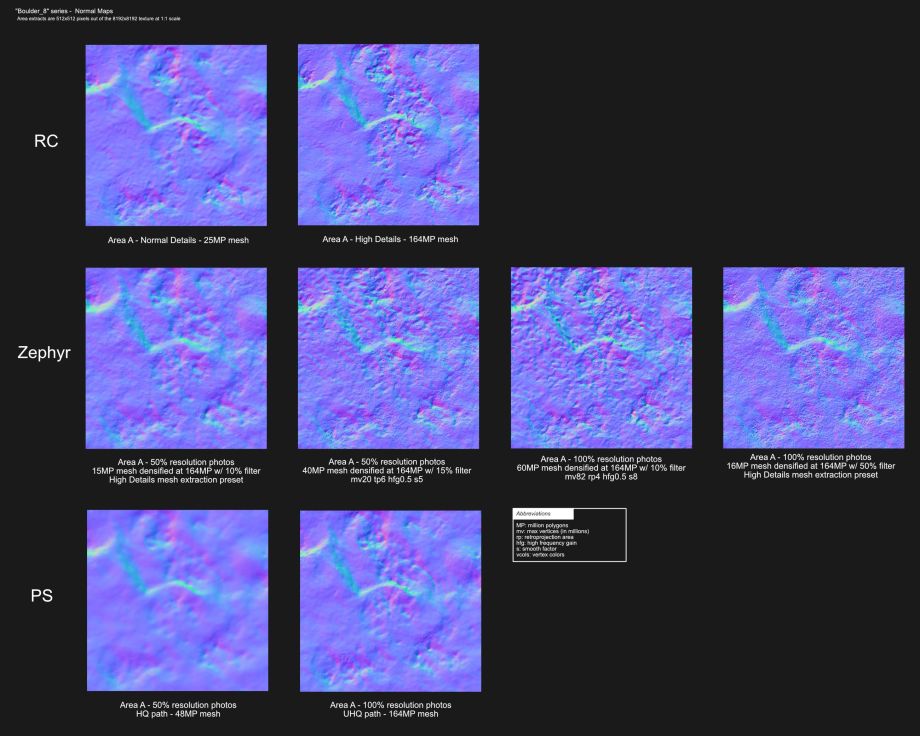
每个解决方案都能够产生相对尖锐的几何形状。在最详细的路径中,RC 清楚地区分了平坦地区和丘陵地区。Zephyr 也实现了清晰度,但增加了其他细节,中等和/或小规模(可配置)。我不仅可以在不添加中等比例细节的情况下锐化大比例细节。PS 还可以在 UHQ 路径中生成详细的几何图形,但比其他解决方案更柔和。这对于光滑的表面尤其有用。
彩色地图
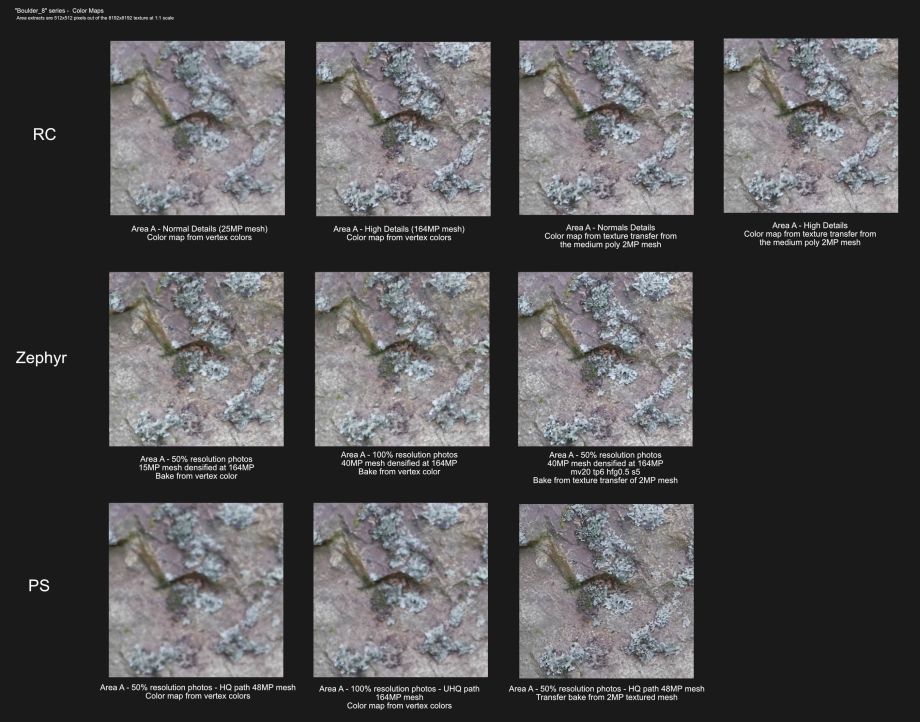
来自纹理转移的烘焙通常比来自顶点颜色的烘焙看起来更清晰,可能除了 RC 高细节模式,其中顶点颜色可以与转移烘焙相似或更明确一些。然而,有两种纹理转移很突出,Zephyr 和 PS 的纹理转移都特别清晰和详细。PS 烘烤虽然可能缺乏均匀性,有些区域非常清晰,有些区域非常模糊,但 Zephyr 版本看起来更稳定。在纹理处理期间在 Zephyr 中启用的模糊检查选项可能对此产生影响。
“Rock_2”系列
本系列和下一个系列中的测试场景主要集中在先前确定的最佳路径上,并围绕它们进行一些测试。此外,所有解决方案都讨论了地图。
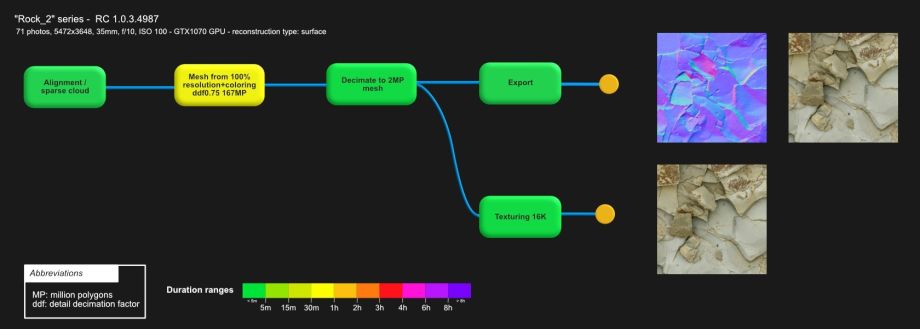
该系列的 RC 测试是使用高细节模式完成的。RC 的处理路径在 1-2 小时范围内。
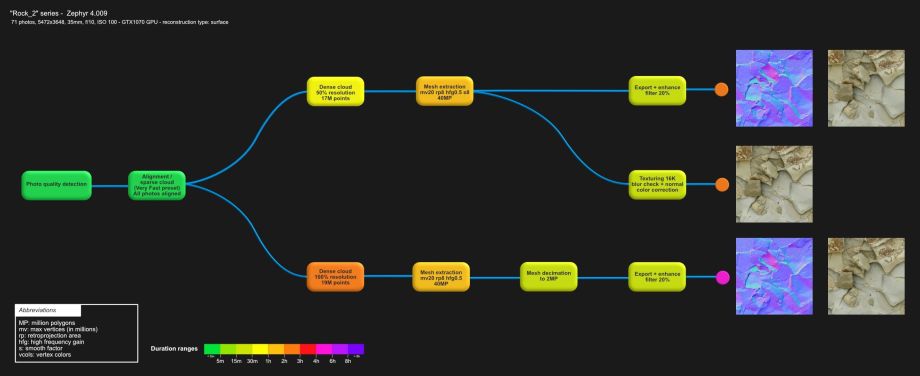
使用 Zephyr,我们在 2-3 小时范围内使用 50% 的照片分辨率路径。与“Boulder 8”系列一样,100% 分辨率路径并没有提供大不相同的密集云,但需要更长的时间来处理,因此与早期的观察结果类似,看起来不是最佳的。
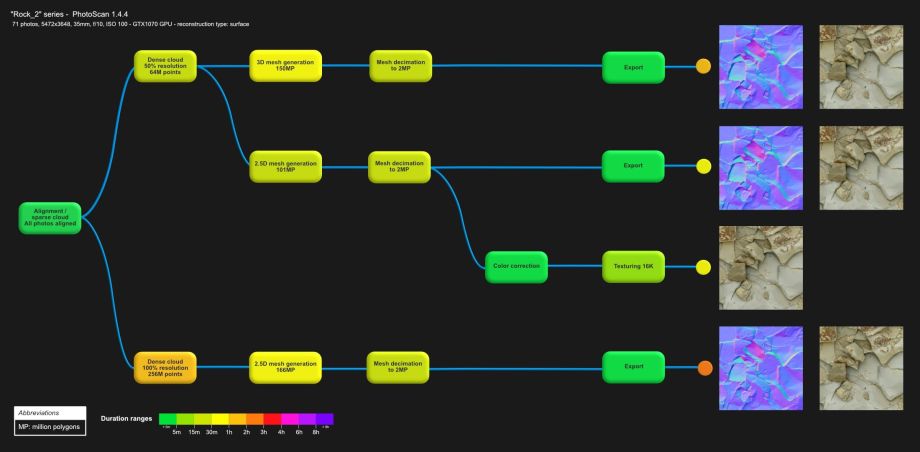
PhotoScan 具有可用于表面的特定 2.5D 网格重建模式。此模式重建点云的顶部而不是侧面,前提是后者与边界框正确对齐。它比 3D 重建更快,并且使用起来几乎没有不便。如图所示,使用 2.5D 重建的 50% 分辨率路径在 30m-1h 范围内。100% 分辨率路径的处理速度比之前的系列快得多,可以用作最佳路径。
总的来说,对于所有测试解决方案,该系列的处理速度比“Boulder 8”快。这一张照片少,深度也少。这次 PS 的处理时间是所有解中最短的,部分原因是它的 2.5D 重建模式。
地图 讨论
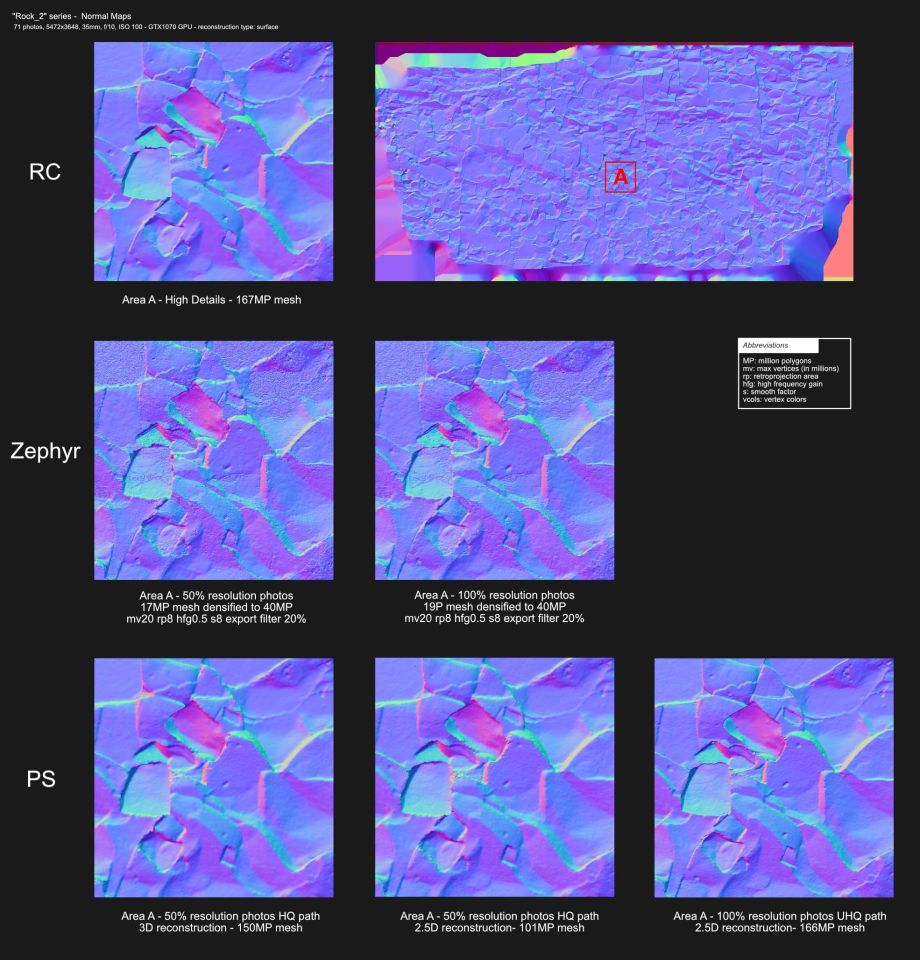
High Details 中的 RC 法线贴图表现出与“Boulder 8”系列相同类型的特征,清晰的大尺度几何图形和很少的小尺度细节。
Zephyr 法线贴图也显示出清晰的大尺度浮雕,但有很多小尺度细节。由于两团密云大小差不多,所以两张地图并没有太大的区别。本系列使用了单一类型的网格提取,但正如我们之前看到的,Zephyr 有许多会影响详细几何形状的参数,因此此处显示的地图只是可能输出的简化集。
关于 PS 法线贴图,UHQ 路径提供了比 HQ 路径更清晰的几何图形,类似于之前的系列。在 HQ 路径上,同时使用了 3D 和 2.5D 模式,我们可以看到结果非常接近,基于 2.5D 的地图在轮廓区域显示了一些更清晰的细节。对于 HQ 3D 路径,我们可以在法线贴图上看到一些垂直和水平的小矩形区域(大约 2 到 4 个像素宽)。我不确定是什么导致了它们(可能与烘焙有关)。但是,在 2.5D 路径中看不到这些。
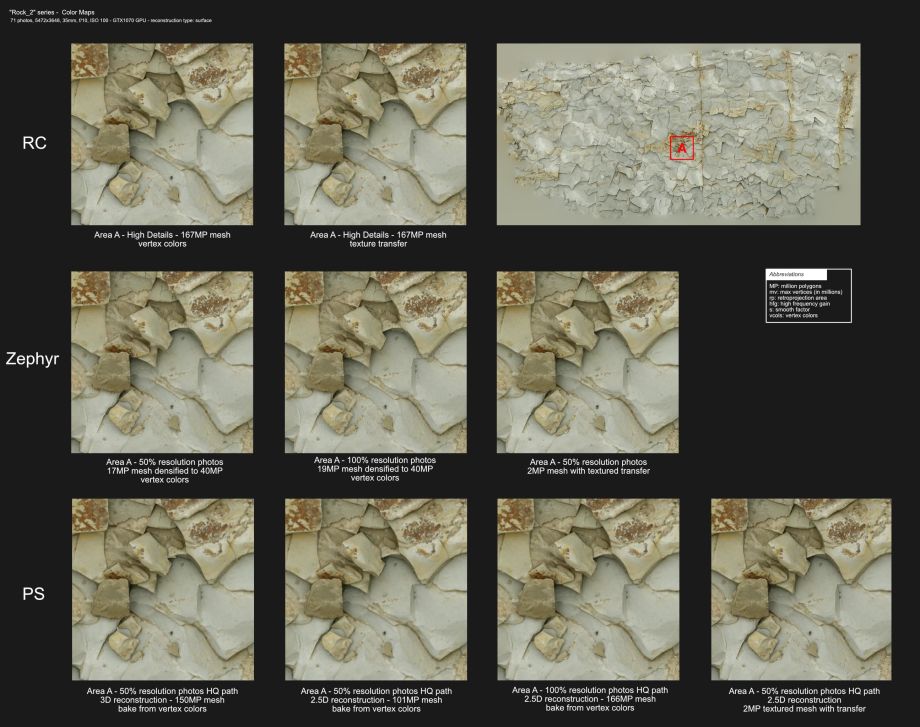
该系列中的彩色地图看起来非常相似。直观地比较两张地图的一种方便的方法是将它们堆叠在两层中并隐藏/显示最上面的一层,当地图看起来非常相似时,我就是这样做的。
RC 颜色贴图从顶点颜色烘焙和纹理转移非常接近,与之前的系列观察相同。
对于 Zephyr,两个顶点颜色烘焙差别不大。然而,转移的纹理烘焙显示出更多的对比度,尤其是在轮廓区域。
PS 的两个 50% 分辨率烘焙相当且相对平滑,100% 分辨率烘焙更清晰。纹理转移烘焙明显比其他两个更清晰,突出了执行此纹理步骤的兴趣。与法线贴图一样,我们在这里也可以看到 3D 重建模式中的那些小矩形区域,但在 2.5D 模式中看不到。
如果我们现在尝试比较每个解决方案的纹理转移烘焙,它们在锐度方面看起来非常接近。
总结一下“Rock 2”系列,所有解决方案都能够在合理的时间内生成相对详细的几何图形和清晰的彩色地图。这个系列的照片比“巨石8”少,深度(表面)更小,而且是在平面上烘焙的,照片质量也更高。这些因素可能有助于取得更一致的结果。
“巨型植物_5”系列
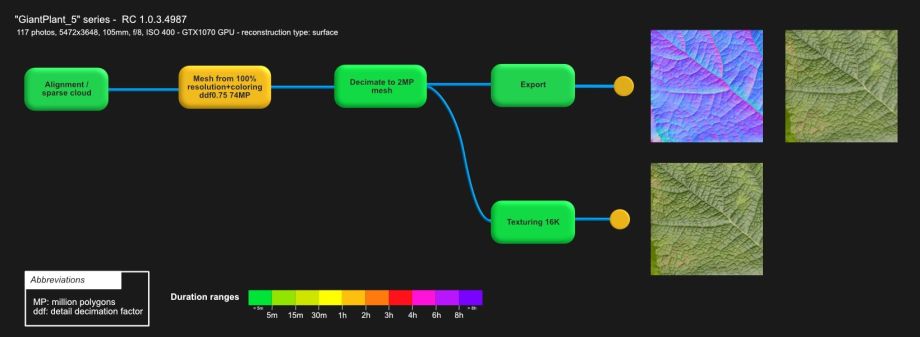
在 RC 中,我使用了高细节模式和在 1-2 小时范围内完成的路径。对齐必须运行两次才能对齐所有照片。
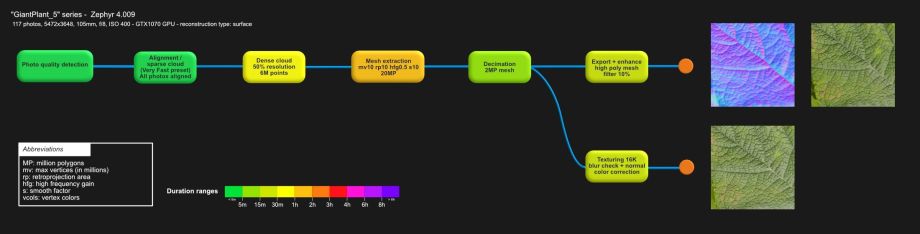
对于 Zephyr,考虑到之前的观察结果,使用看起来最佳的方式生成了单个密集的云和网格。路径在 2-3 小时范围内。
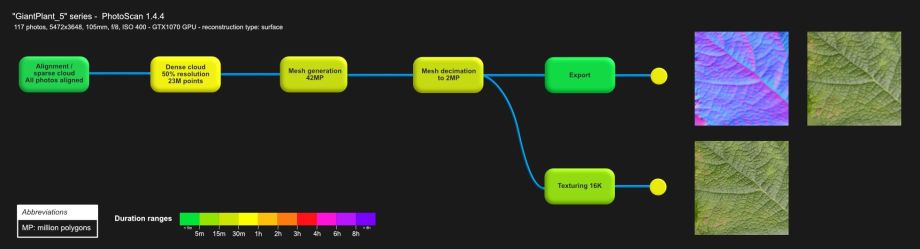
在 PS 中,使用了 HQ 50% 分辨率路径并在 1-2 小时范围内结束。
地图讨论
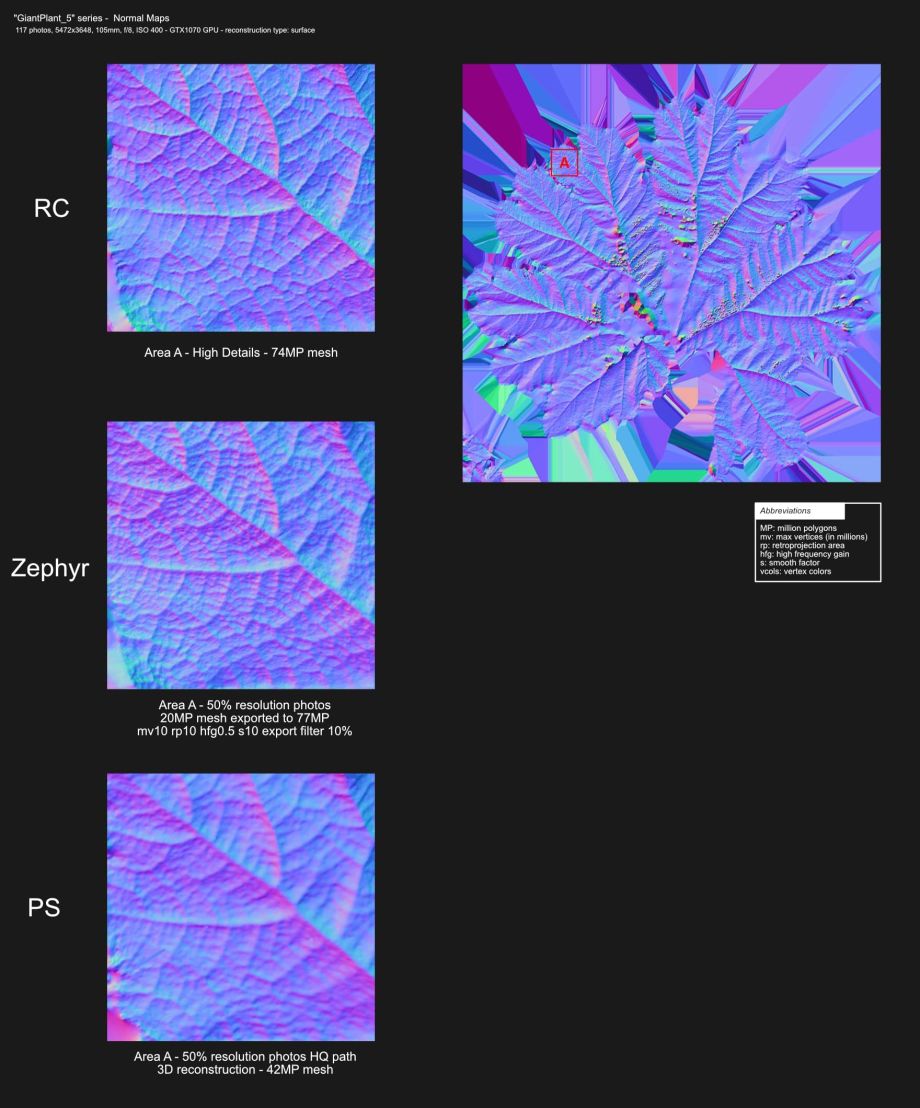
RC 具有相对锐利的大尺度浮雕(肋骨和宏观结构)和较低的小尺度细节。使用所选设置的 Zephyr 烘焙具有稍微不那么尖锐的大型浮雕,但结构内部的细节更多。PS 使用 HQ 路径有更平滑的缓解,但是,UHQ 路径可能会提供更多细节。
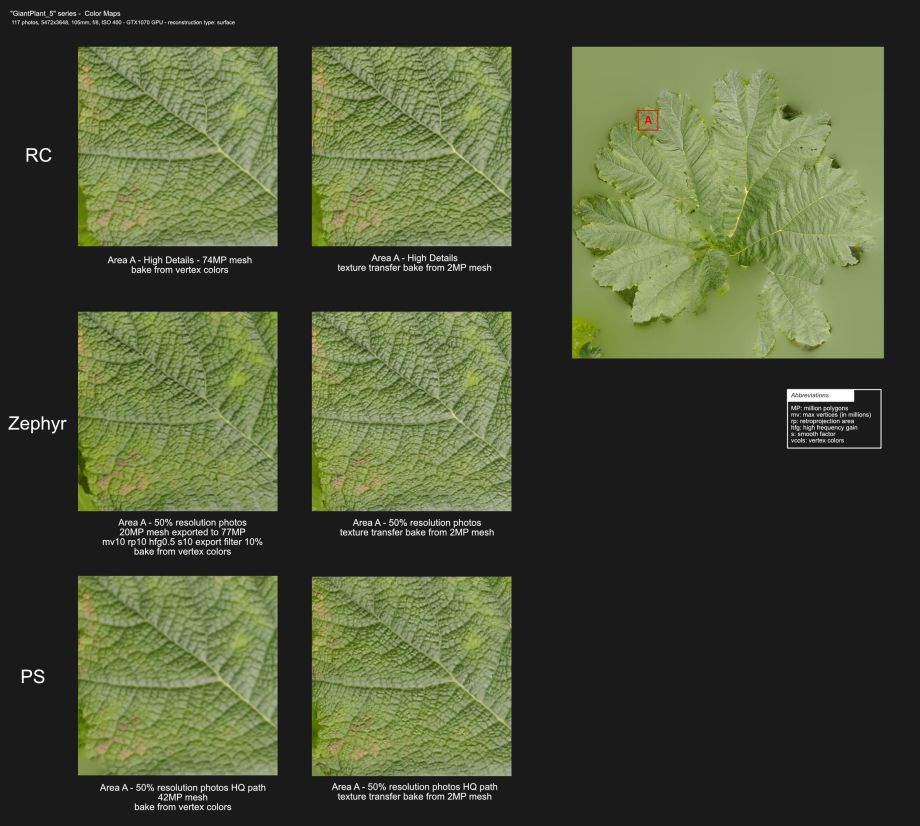
关于 RC,纹理转移的烘焙看起来比顶点颜色的烘焙更清晰。这可能是由于与早期模型(超过 160MP)相比,高多边形网格(77MP)的分辨率相对较低。
对于 Zephyr,纹理转移的烘焙比顶点颜色的烘焙更清晰、更详细。这与早先的观察结果一致,其中该解决方案的纹理烘焙特别清晰和详细。
对于 PS,我们还对纹理传送盒进行了更清晰的烘焙,但是,有些区域清晰,而其他区域则不清晰,这与在“Boulder 8”系列中观察到的情况类似。
如果我们考虑这个系列的所有颜色图烘焙,Zephyr 版本似乎是最详细的。
用户界面和功能
虽然没有对每个解决方案提供的所有 UI 和功能进行详尽的审查,但我在这里强调了那些我认为与我的工作流程特别相关的内容。
通用用户界面
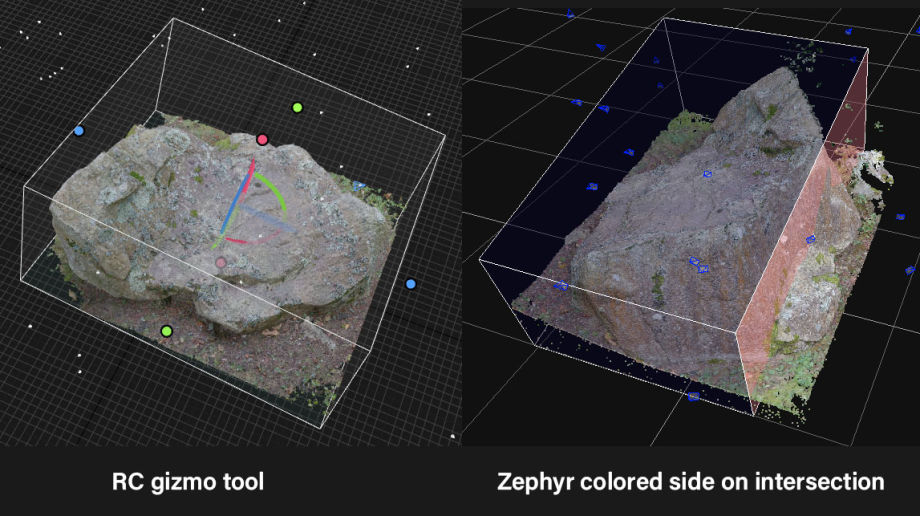
RealityCapture 有一个特别方便和现代的用户界面,基于工作流。可以使用单个 Gizmo 类型工具移动、调整大小和旋转边界框。外部手柄可以调整框的大小而无需旋转视图。
Zephyr 将边界框与点云相交的一侧显示为红色,这有助于将框缩放为尽可能靠近对象。
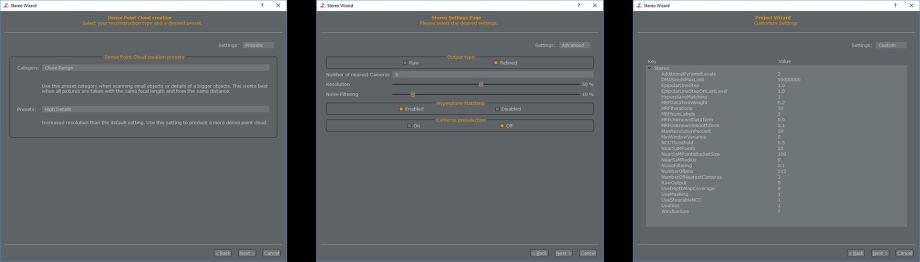
对于密集云生成、网格提取和纹理化等主要功能,Zephyr 具有 3 级向导界面,我们可以从中选择预设、高级设置和自定义设置。所有级别都在同一组设置上工作,它们只是显示不同级别的信息,在一个级别中调整参数可能会影响其他级别。典型的用法是从预设开始,然后在高级级别中对其进行细化。方便,这种方法也是尝试新设置的邀请。
几何闭合
每个解决方案都支持在生成的网格中关闭孔洞,这是一个有用的功能,否则需要很长时间才能手动完成。如果这个功能在 Zephyr 和 PS 中是可选的,那么 RC 似乎是自动执行的,我没有找到任何方法来禁用它,这对于单面网格或具有强烈凹面区域的网格有时是不可取的。
工作流程
所有这三种解决方案都使用户在工作流程中取得进步。Zephyr 在这方面特别详细,致密化是单独处理的,并且可以在网格生成和网格导出期间进行操作,从而提供对最终渲染的精细控制。
点云版
在重建网格之前从密集点云中移除点有时很有用。这有助于防止不需要的几何体,否则一旦构建网格,这些几何体将更难以移除。Zephyr 和 PS 都提供此功能。但是,由于 RC 直接从稀疏点云转到网格,因此没有办法做到这一点。此外,即使 RC 提供点选择工具,似乎也无法从稀疏点云中删除点。
时间管理
所有解决方案都为耗时的过程提供持续时间估计。然而,它们并不总是可靠的,因为它们会随着处理的进行而调整。它们还为长时间操作提供了一个取消按钮,但并不总是及时响应(如网格导出)。所有解决方案都具有暂停/恢复功能,便于在长时间处理期间暂时释放资源。
照片质量评级
Zephyr 和 PhotoScan 都具有照片质量评级功能,这有助于对照片进行分类,尤其是当集合很大时,对每张照片进行单独审查会很乏味。
2.5D 网格重建
正如“Rock 2”系列所见,PhotoScan 的 2.5D 重建功能可用于表面并显着提高重建过程的速度,使其成为此类对象的绝佳解决方案。
合并点云
即使在这些测试中没有使用,当对象不能在单次通过(即对象的顶部和底部)重建时,合并单独的点云以形成单个网格的能力是有用的。PhotoScan Standard 提供此功能。Zephyr 有一个项目合并功能,它可以等效,但在此处测试的 Lite 版本中没有。
可配置性
在参数调整方面,正如在上面的测试中看到的那样,Zephyr 有很多可以影响输出结果的选项。RC 有一些但显然没有那么多,并且使用 dnf/ltnf 修改的测试并不令人信服。PS那里的可见选项很少,但是,可以在首选项中添加调整参数,但由于它们不可见,因此几乎无法使用。有很多选择不一定对每个人都有用,而且可能会损害简单性;但是在 Zephyr 的情况下不是这样,因为用户可以自由选择要进入的细节级别。
结论
正如本文开头所述,这里测试的对象很少,并且只使用了每个解决方案的一部分功能。评估仅基于感知,而非数字数据。此外,软件解决方案也在不断发展,比如 Zephyr即将推出的“Blueberry”版本据说可以提高深度图生成质量和速度等。
所有经过审核的解决方案都能够提供良好的结果,特别是知道 8K 分辨率有点极端。将地图缩小到 4K 或 2K 提供了锐化机会,这往往会使地图看起来更相似。
考虑到所有因素,测试分析显示了反复出现的行为,这有助于更好地了解每个解决方案如何处理数据。完成此审查后,我发现这些解决方案是互补的,每个解决方案都有一些强大或可改进的领域,有时还具有独特的功能。我认为,如果在我的工作流程中存在一个“理想”的解决方案,它可能具有 RC 的速度、来自 RC 和 Zephyr 的几何生成的混合、Zephyr 的可配置性和多功能性、以及Zephyr 和 PS 以及 PS 的特性,例如 2.5D 重建和密集云合并。


